
Modèle
Bruker diINNOVA
Caractéristiques
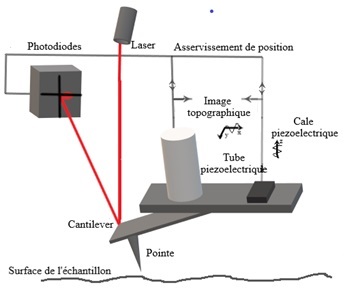
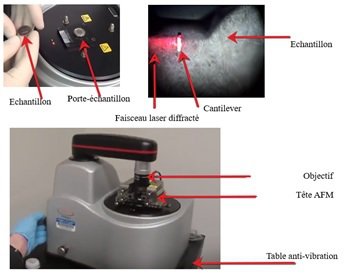
Le microscope à sonde locale est un AFM Bruker diInnova, équipé :
- du logiciel Nanodrive V8.
- d’un objectif ayant une limite de résolution de 250 µm.
- d’une pointe Soft (PPP-NCSTR-20) utilisable en mode tapping = mode contact intermittent (amplitude large) de fréquence de résonnance 76-263 kHz et de coefficient k 1.2-29 N/m
- d’une pastille piezo_électrique (piezo-exitatrice) contrôlant le mouvement oscillant en Z de la pointe
- d’un tube piézo-électrique, précis et rapide, permettant d’ajuster la distance pointe-échantillon et d’asservir l’amplitude de vibration du cantilever
- d’un laser (660-700 nm / 0,2 mW)
- d’un photo-détecteur de position QPSD : 4 cadrans, limite de résolution : 0,1 nm
- d’une cloche métallique permettant d’isoler le système du bruit acoustique et d’une table anti-vibration protégeant des autres vibrations environnantes.
- d’une boucle d’asservissement (le feedback loop), constitué d’un amplificateur différentiel et d’un régulateur proportionnel, intégral et dérivé (PID), permettant de générer un signal d’erreur ΔE, composé de l’amplitude moyen (setpoint) et du signal mesuré en sortie du photodétecteur. Ce signal est minimisé et est ensuite envoyé au tube piezo_Z et à la pastille piezoélectrique. Il est proportionnel à la topographie de surface de l’échantillon.
- Les mouvements verticaux et horizontaux sont effectués à l'aide de deux scanners différents. Pour le déplacement horizontal, le scanner, placé sur l’échantillon (tube piézoélectrique sous une platine de déplacement, balayage XY), a une amplitude maximale de 90 µm avec une résolution latérale de 0,025 nm. Pour le déplacement vertical, situé dans la tête AFM (cale piézoélectrique en contact avec son support), l’amplitude maximale est de 7,5 µm avec une résolution en Z de 0,025 nm.
- Logiciel de traitement d’images WSxM 4.0
Plan fit : Traitement d’images permettant de soustraire les défauts de forme d’ordre n en calculant l’écart d’altitude entre la surface réelle et la surface traitée.
Flatten : Traitement d’images permettant de soustraire les défauts de forme d’ordre 0 à 3 indépendamment. En effet, l’existence d’impuretés en surface peut provoquer un saut de la pointe ou un décalage suivant Z de la ligne scannée par rapport à ses voisines. Le flatten élimine ces discontinuités en soustrayant la courbe des moindres carrés d’ordre 0 à 3.
Les pointes AFM utilisées en mode tapping sont de types :
- Pointes soft (de faible raideur d’élasticité et de haute fréquence de résonnance), plus sensibles aux variations de propriétés physico-chimiques du matériau (dureté, variations de changements de viscosité pour les échantillons mous).
-
Pointes tespa (de raideurs et fréquences plus importantes) disposant d’un plus grand facteur de qualité et constante de temps pour une meilleure sensibilité en fréquence à grande vitesse de balayage.
Autres paramètres importants
Vitesse de balayage : 0,1 Hz - 4 Hz (correspondant à un aller – retour).
Elle est définie initialement en fonction de la rugosité de l’échantillon, de la taille de balayage et de la force d’imagerie.
Surface de balayage : 0,5 µm - 100 µm
Résolution en point/ligne : 64 points/ligne – 1024 points/ligne
Le temps tim d’acquisition de l’image est donné par : tim = NL.tL = NL/fL ; où NL : nombre de lignes, tL le temps mis pour parcourir chaque ligne de l’image, fL la fréquence de balayage des lignes. Diminuer le nombre de pixels de l’image permet donc de réduire le temps d’acquisition ; Par contre, pour des images de scan size < 5 µm où on atteint le nombre maxi de pixels au-delà duquel on enregistre des points de données contenant des infos redondantes.
Rotation : 0° - 360°
Offset XY maxi : ± 50 μm
Le setpoint (consigne de la boucle d’asservissement) est aussi un paramètre important car il pilote le déplacement de la câle piézoélectrique suivant Z. Le rapport, amplitude de travail (Setpoint) / Amplitude d’oscillation libre (sans échantillon), doit être inférieur à 1 (en général il est égal à 60-70% de l’amplitude d’oscillation libre) pour avoir, à la fois, une force de contacte suffisante entre l’échantillon et la pointe, un comportement stable de l’oscillateur et pour réaliser des images dans les conditions les plus appropriées possibles, et afin de venir toucher la surface sans la dégrader. Le choix de la valeur du Setpoint (exprimée en V) dépend principalement de l’échantillon (dur ou mou) et des caractéristiques de la pointe (coefficient k).
Le K de la pointe est un paramètre capital. Sa rigidité doit être la plus près possible de celle de la surface du matériau analysé. Il faut souvent procéder de façon empirique à des essais pour trouver une pointe appropriée. Si la pointe est trop rigide, le résultat peut être destructeur pour l’échantillon ou provoquer son usure. Si la pointe est trop molle, il ne peut pas être en mesure d’interagir avec l’échantillon pour générer un contraste ou alors il reste en contact avec la surface.
Le Gain (drive amplitude) est une constante multiplicative sur le feedback et permet d’obtenir une meilleure réponse du signal. Si le gain est trop élevé, la pointe oscille sans pouvoir bien suivre la surface de l’échantillon. Par contre, si le gain est trop faible, le signal reste propre mais il y a un risque d’endommagement de la pointe.
La constante de rétroaction I doit être proche de 1 pour avoir la meilleure réponse possible (le facteur de qualité décroit linéairement avec I et donc le temps de réponse).
L’intensité du laser (définie en unité de tension) est égale à la somme des signaux des 4 photodiodes et proche de 2 V en temps normal (après changement de la pointe).
La fréquence de résonnance (fo) est égale à 150 kHz environ (pour une pointe Soft PPP-NCSTR-20) et correspond à la fréquence de vibration libre du système pointe-cantilever (sans échantillon). Afin d’obtenir la meilleure sensibilité spectrale de la sonde, fo doit être la plus grande possible.
Le input gain est égal à 2 en général afin d’éviter d’amplifier trop le signal et de casser la pointe ou d’abimer l’échantillon. (Ce gain permet aussi d’accroitre la sensibilité).
Attenuation drive : x 1/x10/x100
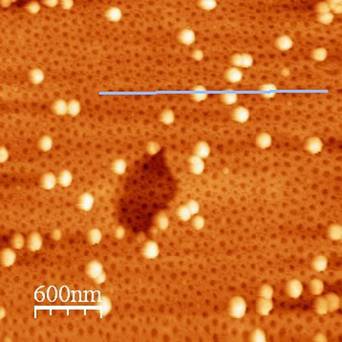
Nanocratères topographie
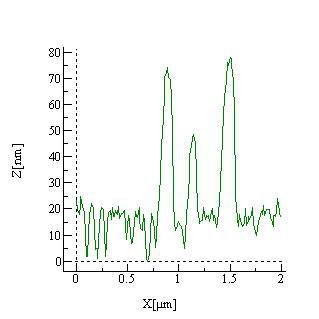
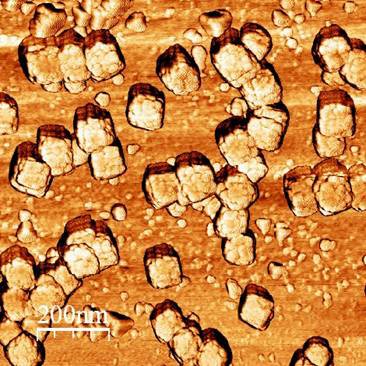
Phase (nanoparticules)
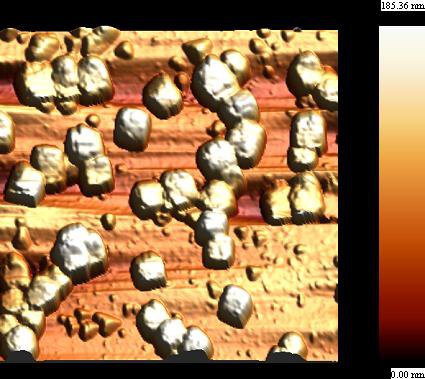
Topographie 3D